Researchers have studied the unique movement of baby yellow anacondas, which use an S-shaped twist to escape danger, offering insights for the development of agile, bio-inspired robots. The study in Nature Physics, which includes mathematical modeling and high-speed video analysis, highlights the “Goldilocks zone” of weight and strength that enables this movement.
Moonwalking baby anacondas provide blueprint for flexible robots
Study of serpentine movement informs factors that dictate structure, control, and energy in robotics
By
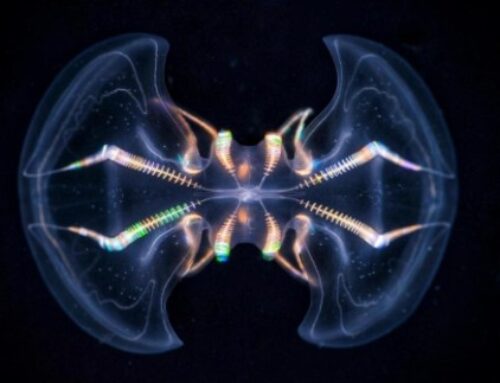
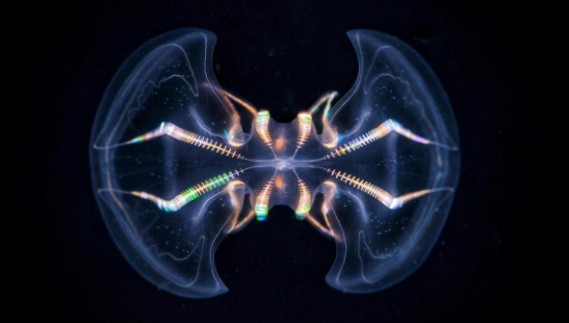
Progression of the S-start in a young yellow anaconda. Credit: Charles N. et al
The way baby yellow anacondas move — a spring-like launch driven by an S-shaped twist to flee from danger — may have given rise to sidewinding, the mesmerising gait of desert vipers and other species.
A study1 involving the Indian Institute of Technology, Bombay, in Mumbai, holds promise for the design of agile, bio-inspired robots capable of navigating complex terrain without limbs, says co-author Raghunath Chelakkot, a soft matter physicist.
While adult anacondas are known for their strength, rather than speed, their young counterparts are nimbler. In the ‘S-start’, the reptile bends its body not just side to side but also lifts parts of its body off (non-planar) the ground. These raised, curved S-shaped segments travel backward along the snake’s body, from the head toward the tail, like a ripple.
When the baby constrictor uncoils and straightens, it catapults itself in a quick burst without slipping. “This motion only works when a snake’s weight, muscle strength, and girth fall within a narrow sweet spot, one that disappears with age and size,” says Chelakkot, who developed the computational model to quantify the movement backed by experiments and observations, including high-speed video analysis.
If the snake is too heavy, it cannot lift parts of its body, an essential requirement for this gait. And if it is too light and strong, it loses control. “It’s like a Goldilocks zone of an anaconda’s weight and strength.”
In nature, many organisms have evolved to manage physical constraints. Frogs and toads leap several times their body lengths using springy legs, body weight and agility. The best jumpers are often mid-sized: big enough for power, but still light and quick. Zebrafish and trout employ similar C-start or S-start flee responses, and how well they work is tied to muscle contraction speed, body stiffness, and fluid drag.
“You even see these ‘Goldilocks’’ effects in how mammals switch gaits, from walking, trotting, or galloping. All of it is influenced by interacting factors such as body size, limb inertia, and tendon elasticity,” says theoretical physicist, Arnab Pal, at The Institute of Mathematical Sciences, Chennai.
In robotics, factors that dictate structure, control, and energy have to click together to hit the engineered Goldilocks zone. Tad McGeer’s passive walkers, which use gravity and leg design to walk downhill without any motors or control systems, and swarming informatic robots, are good examples, adds Pal, who is not associated with the study.
The team, led by L. Mahadevan at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), included herpetologist, Bruce Young, who noticed the movement in juvenile anacondas. To investigate the movement, they developed a mathematical model of flexible elastic rods to simulate the S-bend combined with the non-planar lift.
It was based on three precisely-timed muscular torque pulses on the straight rods. When applied periodically, these pulses recreated the more complex sidewinding movement. They didn’t expect that a few well-placed pushes on the rods could replicate the posture.
By mazzuki1|2025-07-18T12:55:36-04:00July 18th, 2025|Kool-Sci DAILY|Comments Off on Baby anaconda movement could inspire agile robots



{kind=link}
{kind=link}
{kind=link}